

|
|
|
| Vue éclatée de la partie opérative | Photo de l'ensemble monté |
|
|
|
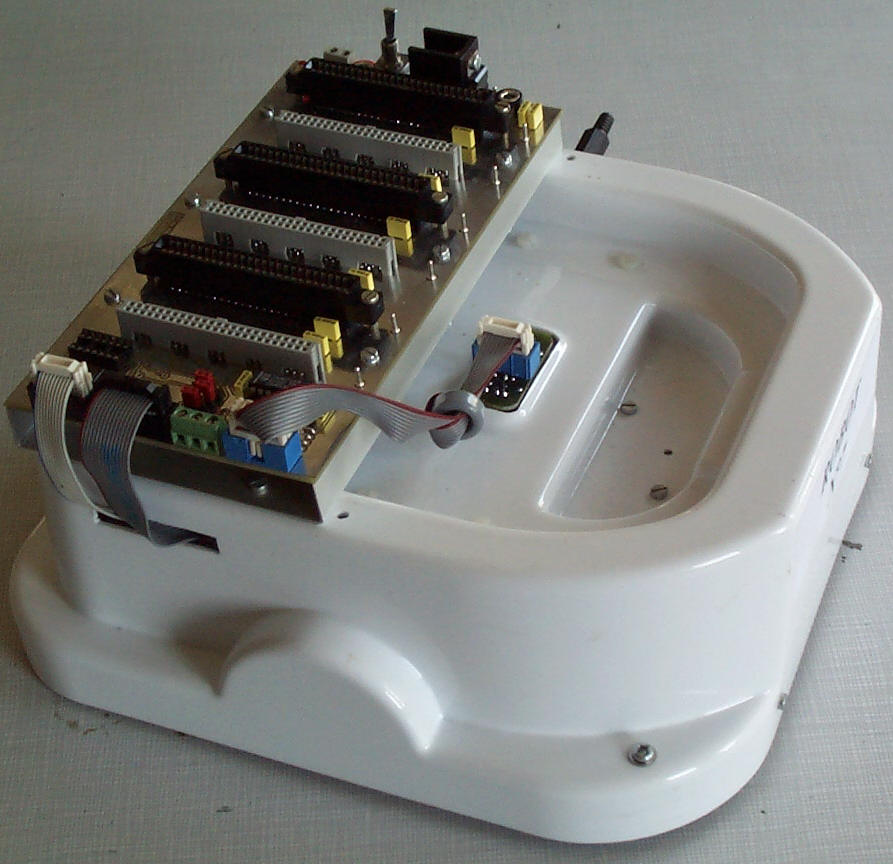
| vue inférieure avec carte de conversion d'énergie | vue du robot et du bus de connexion |
L’ensemble des départements de GEII se sont regroupés pour mettre au point, à partir de l’année 2002, une plateforme de robot équipée de 2 moteurs à courant continu de 20W/12V. Le but est de faire suivre au robot une ligne au sol matérialisée par une ligne blanche de 19 mm de large sur le parcours suivant :
figure 2 : Parcours officiel du concours robot
![]()
Le challenge inter IUT est réservé aux étudiants d'IUT GEII, sauf invitation du comité d'organisation. Chaque département GEII peut présenter au maximum 2 robots.
Les équipes comprennent au maximum 4 étudiants. Ce concours se veut avant tout un challenge entre étudiants : dans cet esprit, un enseignant peut accompagner une équipe, mais il ne participe en aucun cas aux modifications du robot, sous peine de disqualification.
Le robot sera construit à partir d'un kit imposé par le comité d'organisation, comprenant le châssis, les moteurs, les roues et la batterie (cf. annexe). Les parties liées à la motorisation ne doivent être ni modifiées, ni déplacées. La batterie peut être remplacée à l'identique.
Le robot doit être capable de suivre une piste le plus rapidement possible, de faire tomber une première barre située à la fin de la piste et de laisser en place une seconde barre, distante de 20 cm de la première.
Le concours se déroulera sous forme de passage simultané de deux robots.
Le robot doit évoluer sans aucune aide extérieure.
Le design est libre : il donnera lieu à un prix du design, indépendamment de la course.
Le robot sera autonome en énergie. Il utilise obligatoirement la batterie fournie pour la partie motorisation. L'alimentation reste libre pour la partie commande.
Le robot doit suivre une piste blanche, matérialisée au sol par un ruban adhésif de 19 mm, sur un fond en moquette verte (voir référence en annexe) ; des croisements de piste sont possibles, le robot doit alors continuer tout droit.
Le rayon de courbure minimum de la piste est de 50 cm.
Un indicateur d‘intersection avec la piste du robot concurrent est matérialisé sous forme d'une portion de piste perpendiculaire de 50 cm de long et placé 50 cm avant l'intersection.
L'arrêt d'urgence fourni doit être opérationnel et il doit rester facilement accessible. Il doit impérativement couper la partie puissance.
Le jack de départ fourni doit être obligatoirement utilisé : au top départ, un étudiant de l'équipe le retire, permettant au robot de s'élancer.
Le robot doit avoir pour dimensions maximales : largeur : 30 cm, longueur : 30 cm et hauteur : 1 mètre.
Lors des épreuves, l'éclairage ambiant sera élevé (de l'ordre de 3000 lux maximum).
Deux départs sont possibles (voir dessin de la piste) :
� départ 1 : Le nez du robot se trouve 20 cm en avant du début de piste ; le robot part en aveugle.
� départ 2 : Le nez du robot est au-dessus du début de la piste, sur 10 cm.
Le choix du départ 1 donne un temps de bonus.
La programmation préalable du trajet sur la piste est interdite, sous peine de disqualification.
Le chronométrage commence au top départ et se termine lorsque la première barre touche le sol.
Le robot doit faire le tour de chacun des plots correspondant à son parcours, sans les toucher : un plot non contourné ou touché est éliminatoire.
En cas de risque de collision entre deux robots, la règle est la priorité à droite.
En cas de collision entre deux robots, les deux robots recommencent le parcours. Le robot n'ayant pas respecté la priorité à droite devra redémarrer avec un retard supplémentaire de 10 secondes sur le top départ ; si une nouvelle collision se produit, le temps de retard se cumule.
L'arrêt final du robot doit être automatique : un arrêt non automatique donne 1 temps de pénalité.
La deuxième barre tombée entraîne 1 temps de pénalité.
Les temps de pénalité sont de 10 secondes. Les temps de bonus sont de 10 secondes.
Un temps de parcours maximum sera fixé par le comité d'organisation.
Après le départ, aucun membre des équipes ne devra se trouver sur la piste.
![]()
Le robot est équipé de 2 moteurs à courant continu 12V dont les caractéristiques sont les suivantes :
MOTEURTension nominale 12 Volts pouvant être alimentée en 15 Volts Courant en charge nominale 1,45 A Courant max 11 A Vitesse nominale 2640 Tr/mn à 12 Volts 3300 Tr/mn à 15 Volts |
ENTRAINEMENT AU SOLassuré par deux roues associées à un réducteur de rapport 1/5 Diamètre des roues : Ø 52mm Epaisseur du plateau : 5mm Masse à vide : 2 kg Charge utile : 2 kg Vitesse linéaire max. :1,3m/s Effort de poussée : 30 N ( »2 kg ) Voie : 230 mm |
Figure 3 : Vue en coupe arrière et inférieures du robot
figure 4 : Vues latérales et inférieures du robot
![]()
Chaque robot est confié à deux binômes d’étudiants. Le travail est décomposé en trois étapes décrites ci-après. Chacun de ces deux binômes travaillera de manière indépendante pour les étapes 1 et 2 (chacun réalisera sa programmation et ses propres essais) et se répartiront le travail pour l’étape 3 seulement.
En plus des notes prises au cours des séances sur le cahier de laboratoire, il sera demandé un rapport de fin d’année réalisé par chaque binôme concernant les étapes 1 et 2 ainsi que la partie spécifiquement traitée au cours de l’étape 3 (en indiquant le nom de l’autre binôme traitant l’autre partie de l’étape 3).
Le plan type de ce compte rendu vous est fourni en annexe et peut être modifié si vous le jugez utile avec toutefois la contrainte de traiter l’ensemble des thèmes que vous aurez abordés en séance.
Attention : malgré l’aspect ludique de ce projet, l’attention des étudiants est attirée sur le fait que chaque partie doit être traitée avec le plus grand professionnalisme et, notamment, la méthodologie de décomposition fonctionnelle vue dans le cadre du thermomètre, ainsi que lors de la rédaction des différentes fiches de mesures du projet qui figureront dans le rapport final.
Dans ce rapport, on attendra que vous proposiez les évolutions de ce projet pour le rendre plus attrayant sachant qu’il pourra être repris et développé en deuxième année avec, cette fois, l’utilisation d’un microprocesseur et d’algorithmes de calcul plus évolués pour assurer le guidage.
Sur la base de la maquette décrite précédemment, certaines fonctions ont été dégagées et une partie de l’électronique a déjà été réalisée .
|
La partie convertisseur de puissance à découpage | |
|
Le bus de connexion des différents modules éléctronique | |
|
La mise en forme des capteurs de suivi de ligne et de vitesse des moteurs |
Le projet peut être décomposé sous la forme suivante :
figure 5 : Représentation générale du projet
![]()


Il s’agit d’optocoupleur de référence OBP704 (Constructeur OPTEK) qui émet un rayon focalisé et récupère la réflexion de ce rayon par un photo transistor que nous utiliserons pour repérer la position de la bande de guidage.
Figure 6 : Description du capteur de suivi de la ligne de guidage
La mise en forme est confiée à un circuit TTL 74HCT14 (porte inverseuse trigger) et permet de disposer de 6 signaux TTL actifs au niveau 1, nommés capteur1... capteur6 présents sur le bus de connexion du robot. Le capteur 1 désigne le capteur extrême avant droit et le capteur 6 désigne le capteur avant extrême gauche. Référence capteurs : OPB704
Figure 7 : Montage des capteurs de position à l’avant du robot.
Le montage des capteurs de position permet de détecter la bande de guidage de manière exclusive pour les capteurs 1, 2, 5 et 6 (un seul capteur actif à la fois) et non exclusive pour les capteurs centraux (3 et 4). Cette disposition permettra d’optimiser la vitesse du robot lorsque celui-ci sera parfaitement centré par rapport à la bande de guidage.
Cette partie se décompose en deux aspects :
* étude analogique des capteurs de guidage et de leur mise en forme,
* réalisation VHDL du programme de guidage.
Analysez les capteurs optiques de suivi de la ligne (OPB704) d’après la documentation en annexe.
Proposez des solutions de mise en œuvre de ces capteurs (solution à base de trigger ou comparateur) et dimensionner les éléments électroniques de cette mise en œuvre.
Prendre en compte les variations possibles de la tension batterie lors du déroulement du parcours ainsi que de la dispersion des caractéristiques des capteurs.
Relevez les signaux disponibles en sortie des capteurs et le résultat de la mise en forme à l’aide d’un circuit trigger.
Figure 10 : Schéma bloc du guidage en VHDL
A partir de l’information envoyée par les capteurs de guidage (capteur1... capteur6), proposez un algorithme de guidage relativement simple permettant un suivi de la trajectoire. On pourra dans un premier temps adopter un guidage essentiellement combinatoire mais permettant de piloter les deux moteurs avec une seule carte PLD équipée d’un altera 7064S.
Réfléchir à la gestion des deux capteurs centraux pour améliorer les performances en vitesse de pointe, ainsi qu’à une méthode de gestion de l’arrêt en fin de parcours. Les simulations et les fiches de mesures seront insérées dans le rapport final.
![]()

La commande des deux moteurs se fait à partir de deux hacheurs 4 quadrants 12V/4A qui permettent de réaliser l’interface entre le module de guidage (TTL) et les deux moteurs. Cette interface fonctionne en découpage à une fréquence d’environ 3 kHz.
On devra fabriquer, avec le module de guidage, un signal de commande périodique de fréquence fixe et dont le rapport cyclique variera en fonction de la vitesse de rotation désirée pour chacun des deux moteurs. Cette interface fournit aussi une horloge logique TTL à une fréquence d’environ 100 kHz qui nous servira au séquencement du bloc de guidage.

Figure 8 : Schéma de principe du Hacheur commandant les moteurs
Pour faire varier la vitesse du moteur, on doit faire varier la tension moyenne présente à ses bornes. Pour ce faire, on fait commuter les deux interrupteurs K1 et K2 (commandés de manière complémentaire) à une fréquence suffisamment élevée pour que le moteur ne voit que la valeur moyenne de cette tension.
Le signal de commande MLI1A permet de commander l’interrupteur K1 du hacheur du moteur AV droit :
|
Si MLI1A = 1, K1 est ON et K2 est OFF. Dans ce cas Umot = Ubat | |
|
Si MLI1A = 0,K1 est OFF et K2 est ON. Dans ce cas Umot = 0V. |
On peut donc exprimer la valeur moyenne de Umot sur une période
de MLI1A en considérant
Ce hacheur portant le numéro 1 permet de commander le moteur de droite
<Umot>=
Il existe un deuxième hacheur qui permet de commander le moteur 2 (moteur de gauche) via le signal MLI2A. Les règles de fonctionnement sont identiques à celles du hacheur numéro 1 commandant le moteur de droite.
Le circuit d'interface utilisé est un L298 constituant un double hacheur 4 quadrant 2A/40V. Ces deux hacheurs quatre quadrants seront mis en parallèle pour obtenir un courant nominal de 4 A par moteur. Nous utiliserons donc un L298 par moteur. Une des deux commandes MLI (MLIB) sera maintenue à un niveau constant ('1' logique) car dans notre application nous n'utiliserons que le sens de rotation positif.
A noter sur cette carte , la présence de deux commande MLI compatible I2C (DS1050 de Dallas Semiconductor) permettant une évolution de la carte vers une commande par bus de terrain (2 ème année)
Etudiez le principe de fonctionnement du hacheur permettant de commander les deux moteurs. On analysera le circuit intégré L298 permettant de réaliser cette fonction et, en particulier, ses ressources d’entrées/sorties, ses limitations et notamment les règles de mise en œuvre de ce type de composant :
|
Découplage des alimentations | |
|
Limites en tension et courant et protection contre les surintensités | |
|
Limites en terme de fréquence de découpage. |
On proposera un schéma électrique type pour cette partie.
Figure 9 : Schéma bloc de la commande MLI
Il s’agit de synthétiser un bloc VHDL permettant de générer les deux signaux de commande (MLI1A et MLI2A) à partir de deux consignes constantes disponibles sous forme de deux vecteurs de bits ref_mli1A et ref_mli2A. On prévoira une entrée de synchronisation externe de cette mli (SYNCHRO) permettant de réinitialiser les deux sorties MLI1A et MLI2A.
Réalisez le programme VHDL et sa simulation en utilisant une méthode combinatoire et séquentielle de synthèse. Comparez les deux solutions en matière d’occupation du PLD.
A partir de la carte interrupteur, relevez la caractéristique vitesse de rotation moteur/ref_mli envoyée, le robot étant immobile sur cales, afin de conclure sur la linéarité de cette commande MLI. La vitesse pourra être déduite à partir des signaux vit1A (pour le moteur de droite) et vit2A (moteur de gauche) sachant que la fréquence obtenue est de 30Hz/tour/s
Une deuxième série d’essais, robot au sol, réglez quelques couples de valeurs de ref_mli pour les moteurs 1 et 2, relevez les trajectoires en courbe que peut fournir le robot et essayez d’établir un mise en équation de la trajectoire de celui-ci en fonction de ses références de tension.
![]()

Cette carte destinée à être utilisée avec le bus d'alimentation du robot permet de disposer d'un réseau logique programmable évolué de 18 E/S format TTL et regroupées sur un connecteur de bord de carte 25 points.
Ce circuit logique PLD (Altera 7064SLC 44-10) est programmable sur site au moyen d'un câble dédié, c'est-à-dire qu'il n'est pas nécessaire de le retirer de son support.
Le circuit logique principal possède 64 macro cellules disposant chacune de 1 bascules, 18 entrées et 1 sorties logiques . La carte possède un circuit périphérique I2CÓ 8574 qui constitue un véritable port // 8 bits bidirectionnel relié au circuit logique programmable et dont l'adresse est configurable parmi 8 différentes (configuration au moyen d'un dip switch).
2 entrées logiques sont dupliquées sur des entrées spécifiques aux horloges internes du circuit principal(à l’aide de JP1 et JP2). Enfin, l'utilisateur possède deux boutons poussoirs pour activer la carte .La re-programmation peut se faire un millier de fois environ.
Dans notre application, elle regroupe la double commande MLI ainsi que le bloc de guidage. Le taux d'occupation du PLD tourne autour de 70% à 80%. Afin de pouvoir implanterd es algorithmes de commande plus évolués, une version à base de 70256S est en cours de réalisation. Elle permettra en outre de disposer de 25 E/S supplémentaires disponible sur le bus de connexion afin de faciliter l'échange de données entre les cartes.
![]()


Ce bus de connexion permet d'assurer la liaison entre six cartes dotées d'un connecteur de bord de carte (edge 50 points ou de connecteur HE10 50 points) en liaison directe de type point à point.
Il s'inspire des bus de connexion des ordinateurs.
On dispose ainsi des alimentations non stabilisées +12V issue de la batterie ainsi que de l'alimentations stabilisée +5V à partir d'une la tension batterie.
Enfin une série de 50 points test est accessible facilitant ainsi la mesure à l'aide d'une carte sonde amovible utilisant un des connecteurs HE10 50 points.
Sur ce bus, sont implantés une partie des circuits de mise en forme des capteurs de guidage(connecteur HE10 10 points) ainsi que la mise en forme des capteurs de vitesse moteur (HE10 10 points). Enfin un troisième connecteur (HE10 14 points) permet la liaison avec le module de conversion d'énergie implanté sous le robot.
![]()
|
Sujet robot opto-guidé version 2002: sujrobote.pdf (983kO) | |
|
Notice d'utilisation de la carte logique PGM noticeLOG_alt1.pdf (144kO) | |
|
Logiciel de programmation VHDL maxplus2 V10 maxplus2 | |
|
obtention de la licence maxplus2 licence | |
|
Transparents de présentation du projet transparents robot.pdf (522kO) | |
|
Fiche de mesure : fiche_mesure.pdf / fichemesure.doc(word) |
|
|
|
Module interface de puissanceschéma électrique de l'interface puissance implantation et typons de l'interface puissance liste des composants de l'interface puissance |
Module bus de connexionschéma électrique du bus de connexionimplantation et typons du bus de connexion liste des composants du bus de connexion |
|
|
|
Module capteur de guidageschéma électrique des capteurs de guidage implantation et typons des capteurs de guidage liste des composants des capteurs de guidage |
Module de point de testschéma électrique du module de test typons et implantation du module de test liste des composants de horloge_v1 |
|
|
 |
Module logique programmable ALTERAschéma électrique de la carte PGMtypons et implantation de la carte PGM liste des composants de la carte PGM |
Module capteur de vitesse moteurschéma électrique du module capteur vitesse typons et implantation des capteurs de vitesse liste des composants de gest_I2C |
![]()
|
Introduction
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Analyse fonctionnelle du projet
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Conclusion générale |

capteur de guidage: OBP704
Interface de puissance: L298
MLI par bus I2C: DS1050
Capteur de vitesse: